

📘 DBSCAN Clustering (Numerical Solution)
🧠 DBSCAN Concepts Recap
- ε (epsilon): Radius of neighborhood
- MinPts: Minimum number of points (including the point itself) to be considered a core point
- Core Point: A point that has at least
MinPtspoints (including itself) withinεdistance - Border Point: A point that is within
εof a core point but doesn't have enough neighbors to be a core point itself - Noise Point: A point that is not a core and not reachable from any core point
📌 Given Parameters
ε = 1.9MinPts = 4
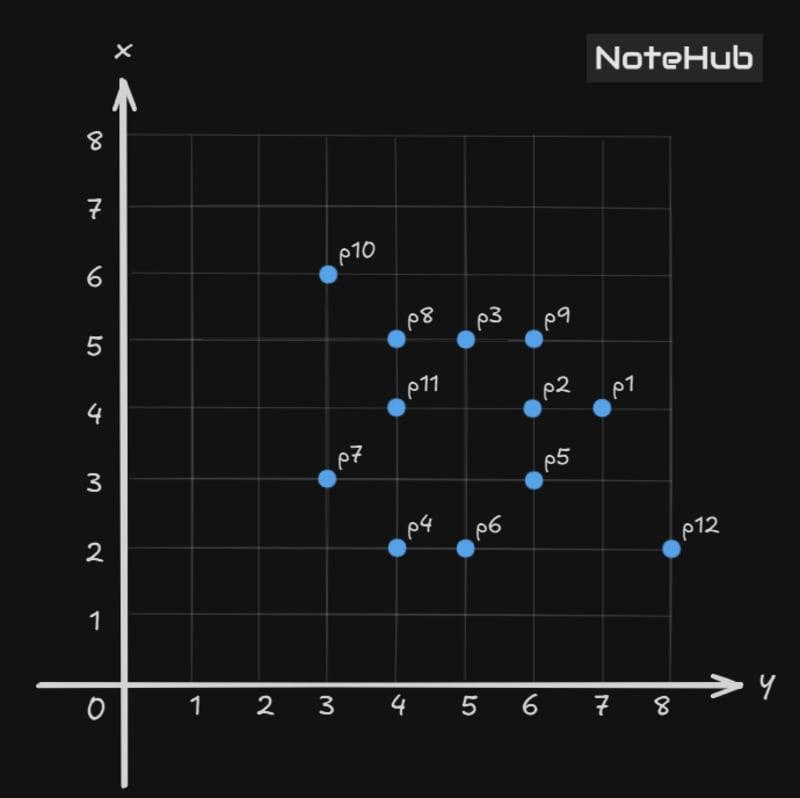
📍 Points (with coordinates)
| Point | x | y |
| P1 | 7 | 4 |
| P2 | 6 | 4 |
| P3 | 5 | 6 |
| P4 | 4 | 2 |
| P5 | 6 | 3 |
| P6 | 5 | 2 |
| P7 | 3 | 3 |
| P8 | 4 | 5 |
| P9 | 6 | 5 |
| P10 | 3 | 6 |
| P11 | 4 | 4 |
| P12 | 8 | 2 |

📏 12x12 Euclidean Distance Matrix (rounded to 2 decimals)
| P1 | P2 | P3 | P4 | P5 | P6 | P7 | P8 | P9 | P10 | P11 | P12 | |
| P1 | 0.00 | 1.00 | 2.83 | 3.61 | 1.41 | 2.83 | 4.12 | 3.16 | 1.41 | 4.47 | 3.00 | 2.24 |
| P2 | 1.00 | 0.00 | 2.24 | 2.83 | 1.00 | 2.24 | 3.16 | 2.24 | 1.00 | 3.61 | 2.00 | 2.83 |
| P3 | 2.83 | 2.24 | 0.00 | 4.12 | 3.16 | 4.00 | 3.61 | 1.41 | 1.41 | 2.00 | 2.24 | 5.00 |
| P4 | 3.61 | 2.83 | 4.12 | 0.00 | 2.24 | 1.00 | 1.41 | 3.00 | 3.61 | 4.12 | 2.00 | 4.00 |
| P5 | 1.41 | 1.00 | 3.16 | 2.24 | 0.00 | 1.41 | 3.00 | 2.83 | 2.00 | 4.24 | 2.24 | 2.24 |
| P6 | 2.83 | 2.24 | 4.00 | 1.00 | 1.41 | 0.00 | 2.24 | 3.16 | 3.16 | 4.47 | 2.24 | 3.00 |
| P7 | 4.12 | 3.16 | 3.61 | 1.41 | 3.00 | 2.24 | 0.00 | 2.24 | 3.61 | 3.00 | 1.41 | 5.10 |
| P8 | 3.16 | 2.24 | 1.41 | 3.00 | 2.83 | 3.16 | 2.24 | 0.00 | 2.00 | 1.41 | 1.00 | 5.00 |
| P9 | 1.41 | 1.00 | 1.41 | 3.61 | 2.00 | 3.16 | 3.61 | 2.00 | 0.00 | 3.16 | 2.24 | 3.61 |
| P10 | 4.47 | 3.61 | 2.00 | 4.12 | 4.24 | 4.47 | 3.00 | 1.41 | 3.16 | 0.00 | 2.24 | 6.40 |
| P11 | 3.00 | 2.00 | 2.24 | 2.00 | 2.24 | 2.24 | 1.41 | 1.00 | 2.24 | 2.24 | 0.00 | 4.47 |
| P12 | 2.24 | 2.83 | 5.00 | 4.00 | 2.24 | 3.00 | 5.10 | 5.00 | 3.61 | 6.40 | 4.47 | 0.00 |
🔍 Core, Border, and Noise Classification (ε = 1.9, MinPts = 4)
Core Point: ≥ 4 neighbors within distance ≤ 1.9
Border Point: < 4 neighbors, but neighbor of core
Noise: Neither core nor border
🔍 Point-wise Explanation
🔸 P1 (7, 4)
- Neighbors P2, P5, P9
- Count: 4
- ✅ Since 4 ≥ MinPts → P1 is a Core Point
🔸 P2 (6, 4)
- Neighbors P1, P5, P9
- Count: 4
- ✅ 4 ≥ MinPts → P2 is a Core Point
🔸 P3 (5, 6)
- Neighbors P8, P9
- Count: 3
- ⚠️ 3 < MinPts → P3 is not a core point
But it lies within ε of P8 and P9 which are a core point - 🔁 Therefore, P3 is a Border Point
🔸 P4 (4, 2)
- Neighbors P6, P7
- Count: 3
- ❌ 3 < MinPts, and not within ε of any core point
- ❌ So, P4 is a Noise Point
🔸 P5 (6, 3)
- Neighbors P1, P2, P6
- Count: 4
- ✅ 4 ≥ MinPts → P5 is a Core Point
🔸 P6 (5, 2)
- Neighbors P4, P5
- Count: 3
- ⚠️ 3 < MinPts → P6 is not a core point
But it lies within ε of P5 which is core points - 🔁 So, P6 is a Border Point
🔸 P7 (3, 3)
- Neighbors P4, P11
- Count: 3
- ❌ 3 < MinPts, and not within ε of any core point
- ❌ So, P7 is a Noise Point
🔸 P8 (4, 5)
- Neighbors P3, P10, P11
- Count: 4
- ✅ 4 ≥ MinPts → P8 is a Core Point
🔸 P9 (6, 5)
- Neighbors P1, P2, P3
- Count: 4
- ✅ 4 ≥ MinPts → P9 is a Core Point
🔸 P10 (3, 6)
- Neighbors P8
- Count: 2
- ⚠️ 2 < MinPts → Not core
But within ε of P8, a core point - 🔁 So, P10 is a Border Point
🔸 P11 (4, 4)
- Neighbors P7, P8
- Count: 3
- ⚠️ 2 < MinPts → Not core
But within ε of P8, a core point - 🔁 So, P10 is a Border Point
🔸 P12 (8, 2)
- Neighbors within ε = 1.9 (NONE)
- Count: 1
- ❌ 1 < MinPts, and not within ε of any core point
- ❌ So, P12 is a Noise Point
🧠 Final Classification Summary:
| Type | Points |
| Core | P1, P2, P5, P8, P9 |
| Border | P3, P6, P10, P11 |
| Noise | P4, P7, P12 |
| Point | Neighbors (within ε=1.9) | Count | Type |
| P1 | P2, P5, P9 | 4 | ✅ Core |
| P2 | P1, P5, P9 | 4 | ✅ Core |
| P3 | P8, P9 | 3 | ⚠️ Border of (P8, P9) |
| P4 | P6, P7 | 3 | ❌ Noise |
| P5 | P1, P2, P6 | 4 | ✅ Core |
| P6 | P4, P5 | 3 | ⚠️ Border of (P5) |
| P7 | P4, P11 | 3 | ❌ Noise |
| P8 | P3, P10, P11 | 4 | ✅ Core |
| P9 | P1, P2, P3 | 4 | ✅ Core |
| P10 | P8 | 2 | ⚠️ Border of (P8) |
| P11 | P7, P8 | 3 | ⚠️ Border of (P8) |
| P12 | None | 1 | ❌ Noise |